
什麼是影像?
我們常用相機記錄著生活中發生的事情,相機所使用的感光元件大多使用三原色原理,經由感光元件上的一層濾片,將三原色各自依收進來的光線強度組合成一張彩色的影片。輪廓是顏色之間的界線,在影像上我們稱之為邊緣,當顏色之間的色顏差異或亮暗程度差異愈大,邊緣即愈明顯。


什麼是顏色?
黑貓為什麼是黑色?白貓為什麼是白色?自然界中紅、綠、藍是光的三原色,怎麼會跟我們所看到的不同,其他的顏色又是怎麼來的?我們常見的白貓,是反射所有的光線,因此當你使用紅光照射白貓時,白貓就變成了紅色;當使用紅光照射黑貓時,黑色吸收所有的光線,因此還是黑色。簡單的說,我們所看到的顏色是反射出的光射,而不是物體吸收進去的光線。我們將彩色的照片拆開看接收到的紅色、綠色及藍色的三張光線圖是什麼樣子的?



綠色果實經過藍色濾片所收進來的光最少,藍色圖最暗;經過紅色濾片收進來的光比藍色多,但比綠色少,因此在綠色果實在綠色濾片所收進來的光最多,也最亮。
什麼是辨識?
在生活中,我們常使用經驗法則,將遇到的事件有規則的做出處理和決定,例如我們看到紅燈停、綠燈行。在十字路口人類的大腦依眼睛看到的視野中,依顏色做出決定,但不只是顏色,還有形狀及位置都是決定的原因,這就是影像處理中的辨識。先將影像中會出現紅綠燈的位置設定為感興趣區間(ROI:region of interest),將感興趣區間中的影像找出紅色或是綠色,而且形狀為圓型,進一步決定要停止或是行走。 除了顏色和形狀,我們也常使用物體的紋理做為辨識的條件。
如何教會機器做辨識?
相同的事情經由每個人大腦的處理,感受都不一樣。在臺灣的教育中,我們常用一致化的教學,教育著看到各事情的標準答案,也因此限制想像的空間。在開放式的教學下,我們會使用發想的方式引導學生,花更多的時間讓學生討論;而封閉式的教學時,我們會使用大量的題庫,訓練學生答題的速度及正確性。在深度學習的模型發展之前,我們習慣使用影像辨識的方法設計演算法,將即有的經驗法則轉換成不同的辨識程式進行過濾及判斷,經由封閉性測試後進行大量的開放性測試系統的穩定度,並且不斷的在開放性測試中將遇到的問題修改演算法。使用封閉性的深度學習也是常見的方法,經由收集大量的影像或數據搭配標準答案,不斷的重覆教會深度學習模組如何回答出正確答案,但我們不會知道模組中運用了什麼方法辨識,就像一個黑盒子,我們也不會知道我們的腦細胞是怎麼計算數學是一樣的。而開放式的使用深度學習模型,如生成式網路生成仿真照片,我們會給予對抗網路中真實的照片,由生成網路自動生成照片,將結果送至比對,一直學習到比對不出真假為止。
舉例:
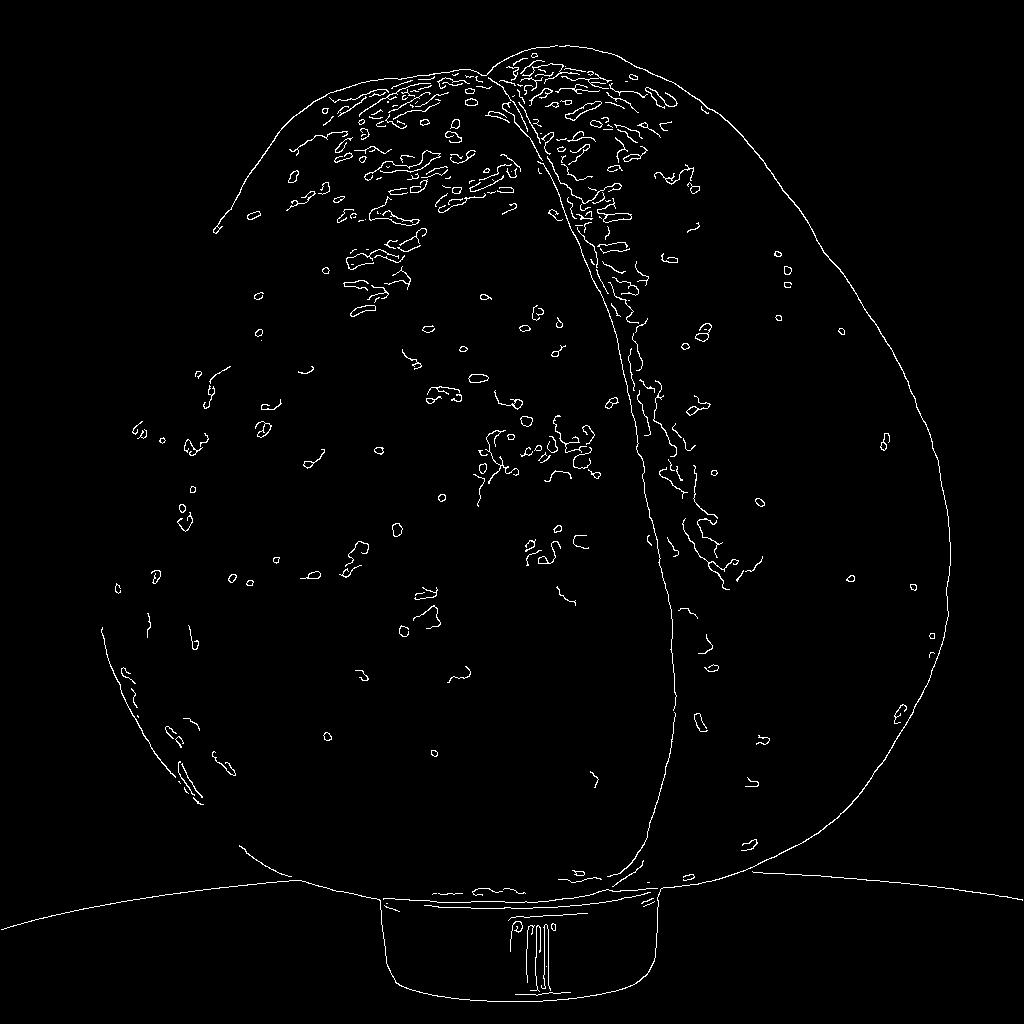
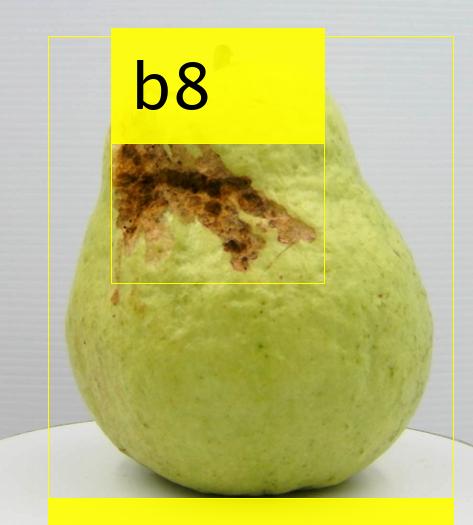
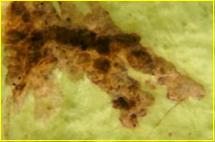
影像辨識在農業上的運用與在工業上不同,在農業上沒有標準的場域,因此存在許多的環境變因。相對來說較為單純且可控制的環境就如同於包裝場中,要怎麼減少人力於把瑕疵品或次級品排除的品質分級機,目前穩定使用中的大多為重量分級機,但在果實外觀的分級上,還是以人工為主。若我們要使用影像辨識於番石榴果實外觀分級,(1) 顏色:果實的綠色程度;(2) 瑕疪:是否有病害或是物理性傷害。在顏色的部份,可以在果實旁邊放置標準色卡,比較果實的影像與色卡中哪一個影像最為相近。我們經由深度學習辨識果實的瑕疪類別及位置,將影像中果實瑕疪的位置區域標示出來。如例子中為瘡痂病,經由顏色辨識,將綠色與非綠色區分出來,就可以自動判斷出瑕疪的範圍及大小,如例子中白色點數量及區域。


將影像辨識與深度學習運用於農業為近年來的趨勢,如何運用適合的系統輔助農業的發展也是我們努力的目標,期望在未來產官學的合作下,發揮臺灣的軟實力將臺灣農業再創新的高度。
作者簡介

張嘉熒 助理教授
主要研究方向為影像辨識與深度學習於農業之應用,包括果實品質檢測、果實成熟度檢測及自動化機械如何應用於溫、網室及農產品品質一致性。